
Requisitos de finalización
Descripción del proyecto
En esta oportunidad seguiremos los pasos para la construcción de un robot rastreador. Trataremos que marche a la menor velocidad posible, para poder hacer una carrera en la que gane el último!
¡A construír y conectar!
El diseño físico del autito es se logra con el siguiente armado:
Piezas y dispositivos
- Ladrillo inteligente R8
- Batería
- 2 motores
- 2 Cables RJ11
Sensores y Actuadores
Motor eléctrico
Un motor es una maquina eléctrica que convierte la energía eléctrica en
mecánica, provocando un movimiento rotatorio en su eje. Este motor
maneja dos señales que permiten controlar su sentido y velocidad.
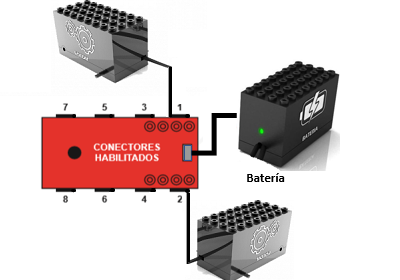
¡A conectar los componentes!
Conectar el motor en CON1 y CON2 el Ladrillo Inteligente «R8»
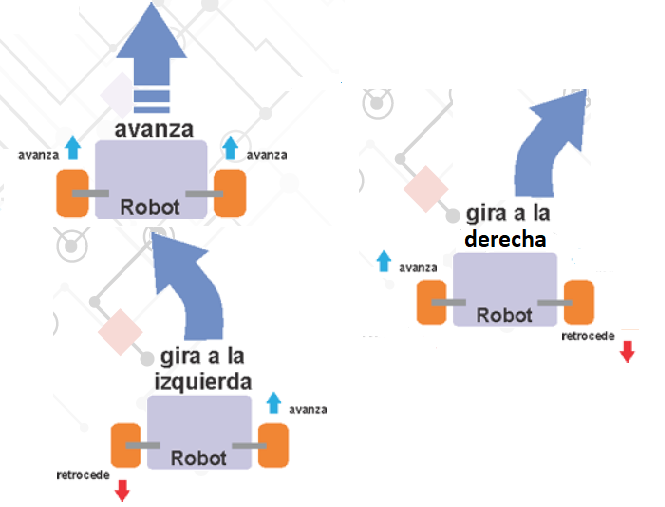
Recordemos como mover en distintas direcciones
Al estar ambas ruedas motorizadas pero conectadas una en cada motor, si la rueda izquierda va hacia adelante y la derecha hacia atrás, el Autito gira hacia la derecha. Y en sentido inverso, si la rueda derecha va hacia adelante, y la izquierda marcha atrás, el Autito gira hacia la izquierda.
- Si queremos que el robot avance lentamente en línea recta, ¿qué parámetros debemos utilizar?
- Para lograr que las ruedas tengan diferentes velocidades, ¿Qué elemento del bloque Motor se debe modi car? ¿Avanzará en línea recta en este caso?
- ¿Qué rol cumple el signo de resta (“-”) dentro en el parámetro “Vel” ?
¡A programar!
Vamos a aprender a mover el robot a
diferentes velocidades.
Para ello, tenemos que cambiar el
valor indicado en Vel , puede tomar valores positivos (marcha adelante),
cero (detenido), negativo (marcha hacia atrás).
El valor indicado en Con, es el puerto en el que se conecta cada motor.
En el ejemplo activamos el motor 1 y el motor 2 a velocidad 20 durante 5 segundos.
A continuación, activamos el motor 1 y el motor 2 a velocidad -20 (hacia atrás) durante 5 segundos.
Al finalizar este programa, el robot debería marchar adelante 5 segundos , retroceder durante 5 segundos y seguir haciendo lo mismo hasta que lo apaguen.
Desafío:
¿Cómo podemos hacer para que nuestros robots jueguen una carrera lenta?
- Hagan que el robot avance lo más lento posible.
- Realicen una competencia de robots donde gane el último que llega a tocar la pared, pero poniendo un tiempo máximo para llegar a la meta (es decir, quedan descalificados los robots que tardan más del tiempo máximo estipulado).
- Registren las actividades a través de un video y compártanlos en el Foro "compartiendo"
Otra propuesta:
¿Se animan a realizar una carrera donde gane el que llega segundo?
¡A programar!
Última modificación: sábado, 22 de febrero de 2025, 17:51