
Completion requirements
Descripción del proyecto
Construiremos un vehículo con dos motores independientes y un sensor infrarrojo (IR) o sigue-líneas. No hay instrucciones específicas de armado simplemente les mostramos algunas fotos de una de las alternativas posibles.
¡A construír y conectar!

Piezas y dispositivos
- Ladrillo inteligente R8
- Batería
- 1 sensor infrarrojo
- 1 Cables RJ11
- 2 Motores
- Toda la decoración extra que le quieras poner!
Sensores y Actuadores
SENSOR INFRARROJOS (IR): o siguelineas permite
medir distanc ia enviando y recibiendo una luz que no se ve, similar a
un control remoto. La detección del objeto se consigue por la
reflexión (o no) del haz de luz infrarrojo sobre la superficie del
objeto. Este sensor que se utiliza habitualmente para detectar el color de un objeto,
en nuestro caso, vamos a utilizarlo para saber si el robot está sobre
la mesa (refleja entonces blanco) o está en el borde (no refleja,
equivalente a negro).
ia enviando y recibiendo una luz que no se ve, similar a
un control remoto. La detección del objeto se consigue por la
reflexión (o no) del haz de luz infrarrojo sobre la superficie del
objeto. Este sensor que se utiliza habitualmente para detectar el color de un objeto,
en nuestro caso, vamos a utilizarlo para saber si el robot está sobre
la mesa (refleja entonces blanco) o está en el borde (no refleja,
equivalente a negro).

MOTOR: Un motor es una maquina eléctrica que convierte la energía eléctrica en
mecánica, provocando un movimiento rotatorio en su eje. Este motor
maneja dos señales que permiten controlar su sentido y velocidad.
¡A conectar los componentes!
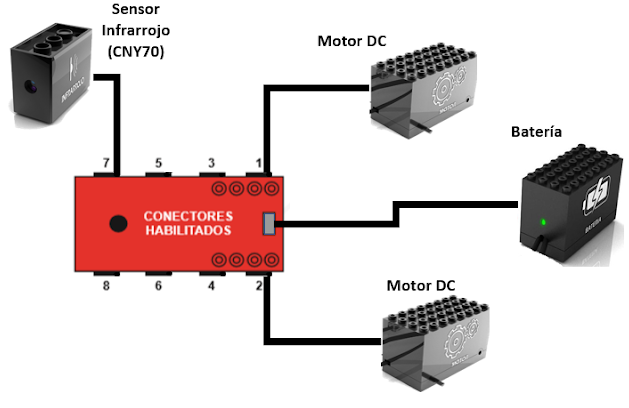
Conectar los dos motores en CON1 y CON2 del Ladrillo Inteligente «R8». Como puede observarse, el sensor se conecta en el puerto 7.
¡A programar!
Se ponen ambos motores en velocidad 100, para que el robot marche en linea recta. Cuando detecta el borde, frenamos (ambos motores en velocidad 0) por un segundo, y hacemos un giro en algún sentido durante un segundo.
Desafío:
¿Qué otras formas de evitar que se caiga de la mesa podemos hacer?Actividad
- Cambiar la velocidad y el sentido del giro.
- Retroceder antes de girar.
- Hacer sonar una bocina al detectar el borde.
- Registren las actividades a través de un video y compártanlos
Last modified: Wednesday, 22 November 2023, 11:48 AM