
Requisitos de finalización
CONFIGURACION
Utilizaremos un programa que se llama OttoBlockly, también se puede utilizar el programa mBlock que utilizamos siempre, buscando como dispositivo un Arduino Nano (OLD).
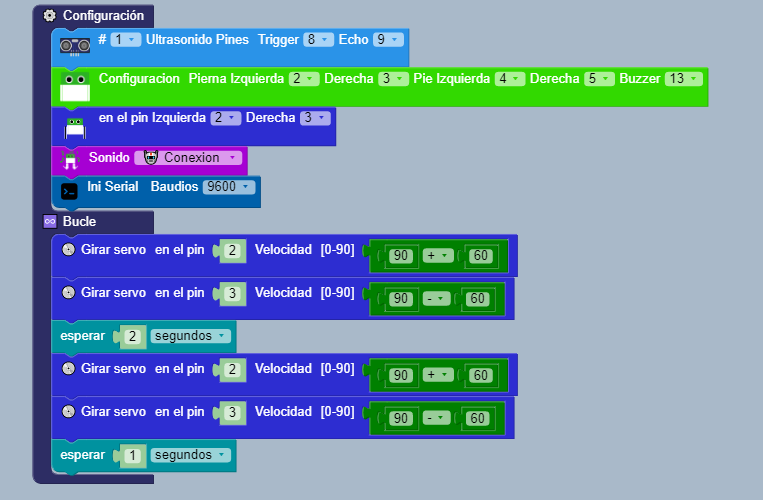
Para comenzar pondremos la configuración inicial, que permitirá utilizar más adelante los motores y los sensores 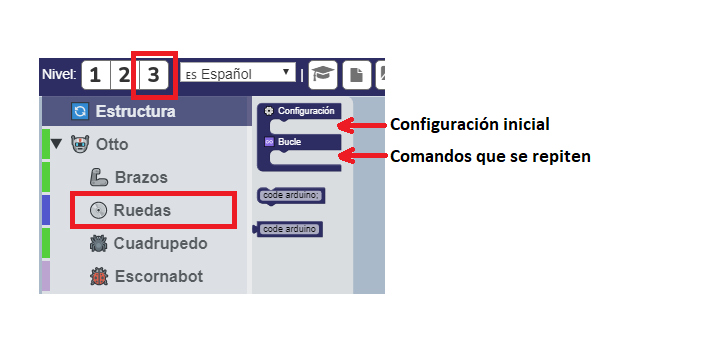
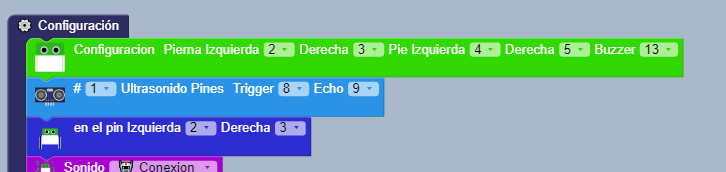
SIEMPRE SE DEBE PONER ESTA CONFIGURACION INICIAL, PRESTAR ATENCION:
Los motores estarán en los pines 2 y 3.
El ultrasonido se configura en los pines 8 y 9.
Los sensores de abajo estarán en los pines 5 y 6 (si el robot trae un sólo sensor, será el que esté ubicado en el puerto 5).
1) PROBEMOS LOS SONIDOS DE OTTO
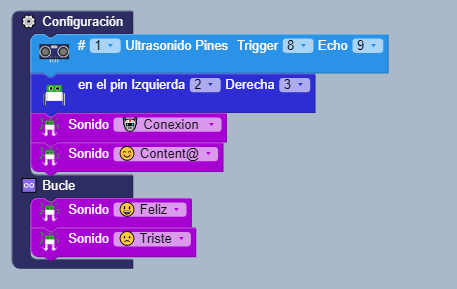
💡 Probaste todos los sonidos?
A MOVER EL ROBOT OTTO:
Existen dos bloques que permiten mover el robot, que tienen distintos usos:
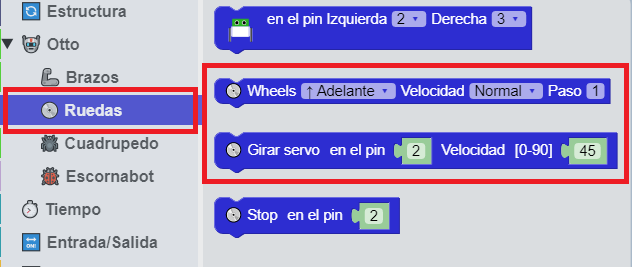
METODO 1: este método sirve para hacer movimientos fijos. El Paso indica que tan largo o corto es el movimiento.
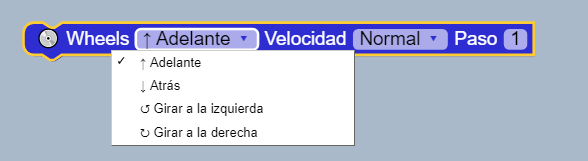
Utilizando este método intentemos hacer que Otto se mueva haciendo las siguientes figuras:
1) CUADRADO CHICO LENTO
2) CUADRADO GRANDE LENTO
3) RECTÁNGULO CHICO RÁPIDO
💡 ¿Podrías hacer un círculo con este bloque?
METODO 2: este método sirve cuando queremos avanzar, y al mismo tiempo ir controlando los sensores. O para hacer círculos.

AVANZAR DOS SEGUNDOS Y GIRAR 1 SEGUNDO
HACER UN CÍRCULO

Probemos los siguientes desafíos:
- Ir adelante y atrás
- Poner dos marcas en el suelo a 60cm y que el robot vaya y vuelva
- Cómo haríamos para movernos haciendo zig zag

AVANZAR Y ESQUIVAR

Felicitaciones! Terminamos la primer parte de mover el robot OTTO.
Última modificación: domingo, 11 de junio de 2023, 20:47